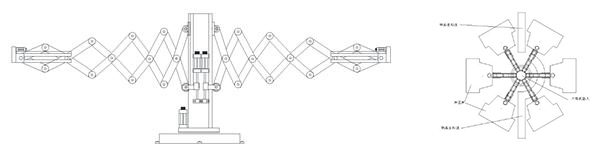
创新机械臂本体结构,为佛山某制造企业制作了超长臂平面机器人。该机器人伸缩臂由非线性剪叉机构复合构成,它克服了一般剪叉式臂伸展时底部支撑变窄承受力变小的缺陷,非线性结构的创新使得臂伸展时底部支撑基本不变甚至变大,这保证了臂的刚度和强度,并且可以不用精密减速机。