记得多年前我在纽约大学电脑学院读博时导师鲍尔.怀特说:“关节型机器人已经发明三十多年了,这么长的时间内在本体结构、电脑算法和控制技术领域都有非常多的发展和进步,为什么关节型机器人还同三十年前几乎一样?”怀特教授是美国工程院士、同时也是我们纽约大学机器人和人工智能实验室主任,讲授计算机系开设的研究生《现代机器人》升级课程,该课《现代机器人》入门课程由李泽湘博士讲授,他后来是大疆科技和固高公司的创始人。怀特教授这番话可谓是让我刻骨铭心,因为又过了三十年关节式机器人还是和六十多年前几乎一样!而三个科技领域:本体结构、电脑算法和控制技术又有更长足发展,三十多年来不禁让我有多次的问。
本文重点着重于关节式机器人的本体结构方面的某些技术揭底,尽管机器人的本体结构与电脑算法和控制技术难以割裂,但首先重点在机器人本体方面讨论比较简单易懂一些,随后再在控制和算法方面讨论。
《启示录》上记载了四个骑快马人horseman的故事,启示当四个骑马人来到的时候,人类境况会有大挑战。工业关节型机器人界也有四个骑快马人,他们的到来也会使机器人行业引来大挑战。
看!第一个骑快马人已经到来。
 还记得Delta机器人(也称蜘蛛机器人)是什么时候在国内工业应用上喷发的吗?大约是五、六年前吧,现在仍然呈增长趋势,这是第一个骑快马人的来到。Delta机器人的一个显著的特性是运动速度极快,快到可以抓苍蝇。它迅速地进入到各类轻型产品的生产线,如电子类和食品类工业,提高了生产效率和产品质量。为什么它可以提高速度这么多,因为它在关节臂上的电机全部移到了固定的基座上,这样极大地减少了转动惯量,从而所需驱动的动能极大地减少,因此速度可以大幅提高。
还记得Delta机器人(也称蜘蛛机器人)是什么时候在国内工业应用上喷发的吗?大约是五、六年前吧,现在仍然呈增长趋势,这是第一个骑快马人的来到。Delta机器人的一个显著的特性是运动速度极快,快到可以抓苍蝇。它迅速地进入到各类轻型产品的生产线,如电子类和食品类工业,提高了生产效率和产品质量。为什么它可以提高速度这么多,因为它在关节臂上的电机全部移到了固定的基座上,这样极大地减少了转动惯量,从而所需驱动的动能极大地减少,因此速度可以大幅提高。
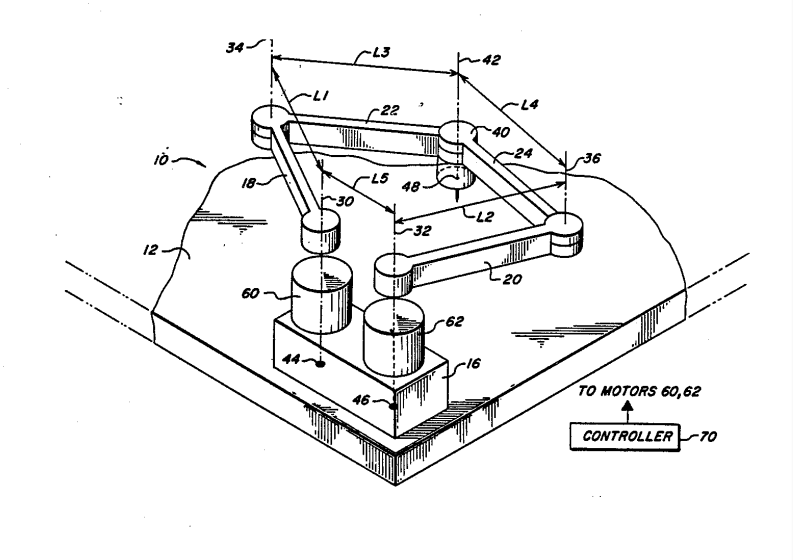
可是它的发明是二十五年前,实际上它的模型建立得更早,见上图当时的专利图之一,引用专利 US 4505166。为什么滞后了二十多年?这期间各国工业浪费了多少资源?谁把它冷冻储藏了二十年后直到专利期满成为公众财产?Delta机器人到头了吗,可不可以再创新呢?
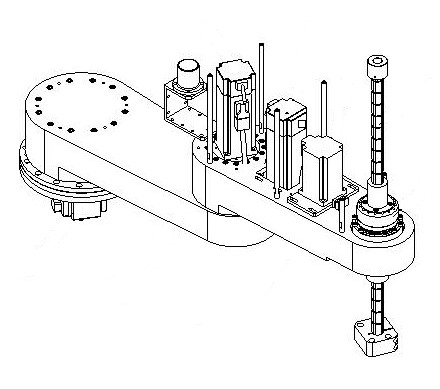 接下来,同是关节式机器人的SCARA形式的平面机器人可不可以提速到这个等级呢?从下面旧式的SCARA图可看到,它有三个电机和两个精密减速机都安装在前小臂上(通常采用谐波减速机)。
接下来,同是关节式机器人的SCARA形式的平面机器人可不可以提速到这个等级呢?从下面旧式的SCARA图可看到,它有三个电机和两个精密减速机都安装在前小臂上(通常采用谐波减速机)。
 事实上新的SCARA早就横空出世了,速度奇快,也是快到可以抓苍蝇。这第二个骑快马人也已经来到了,我们可能有所不知。下图为原美国MIT实验室The Charles Stark Draper Laboratory研发的SCARA平面关节型机器人,专利号 US #4,712,971。
事实上新的SCARA早就横空出世了,速度奇快,也是快到可以抓苍蝇。这第二个骑快马人也已经来到了,我们可能有所不知。下图为原美国MIT实验室The Charles Stark Draper Laboratory研发的SCARA平面关节型机器人,专利号 US #4,712,971。
我们知道由于旧式的SCARA前臂上装有三个电机加上减速机,很大程度地限制了臂的移动速度和加速度,机器人像是戴着镣铐工作一样,前臂上负载的清空使得SCARA机器人可以表演空手道。然而比Delta 机器人更优的是它不但可以抓苍蝇,还可以打老虎,难道不是吗?它的双臂比Delta的臂粗壮好多,主要是因为它的臂只在水平面上运动,不需像Delta那样有抬臂动作需克服臂的自重量,因而它的臂可以做得很强壮。而且更优惠的是机器人可以不用精密减速机了,大家知道精密减速机很昂贵,占了总体成本的40%,这里说的减速机是RV减速机或谐波减速机,他们都是精密减速机的范畴。
为什么机器人臂上的电机和减速机移到固定基座上,其速度可以大增呢?数理方法解析可以得到清晰的图景画面,分别用卡尔曼滤波法、牛顿迭代法、以及拉格朗日动力学广义动能方程求解即可得到该结果,网上可以检索到多篇学术界论文已得出优化结果,例如浙江大学张铁等人【平面关节型机器人关节力矩的卡尔曼估计】一文, 浙江大学学报(工学版),v.52; No.337(5);138-146,这里不再展开,直接给出结果:用拉格朗日广义动能方程求解,得出旧式的平面关节型机器人的驱动动能主要的有13项,而新式的只有3项,少了10项之多。所有的研究成果全都指向一个关键因数;即机器人臂上的负载(例如电机和减速机)越重和负载离基座的距离越大,所需的驱动动能就越大。相信许多喜欢体能锻炼的朋友都练过哑铃,为了增加手臂的肌肉力量,每天手握铁哑铃运动,哑铃越重手臂伸得越长越费力气。如果去掉了臂上的电机和减速机,驱动动能可以减少5倍以上,这是很大的红利啊!
 再深一步挖掘,发现新型SCARA有一个软肋,因为双臂并联的关系它所占的平面工作空间大了近一倍,在生产线上多工位排列势必导致生产线拉长。将其中一个臂90度旋转抬起来安装就解决这个问题了,既双臂成90度垂直并联,专利号CN2019220014325。
再深一步挖掘,发现新型SCARA有一个软肋,因为双臂并联的关系它所占的平面工作空间大了近一倍,在生产线上多工位排列势必导致生产线拉长。将其中一个臂90度旋转抬起来安装就解决这个问题了,既双臂成90度垂直并联,专利号CN2019220014325。
再深一步挖掘,发现新型SCARA的终端位置安装上下垂直移动轴3的地方也是双臂交接的位置,凸显位置小工艺制作上安装困难,创新的方案是臂12采用折弯型的,垂直轴正好可以安装在折弯处。变形后的终端位置怎样精确控制?由于折弯臂的几何形状是已知的,对电脑数值控制的机器人的算法这不是个事,就是三角函数的运算嘛。折弯的角度数可灵活选取,甚至可以取锐角前突。
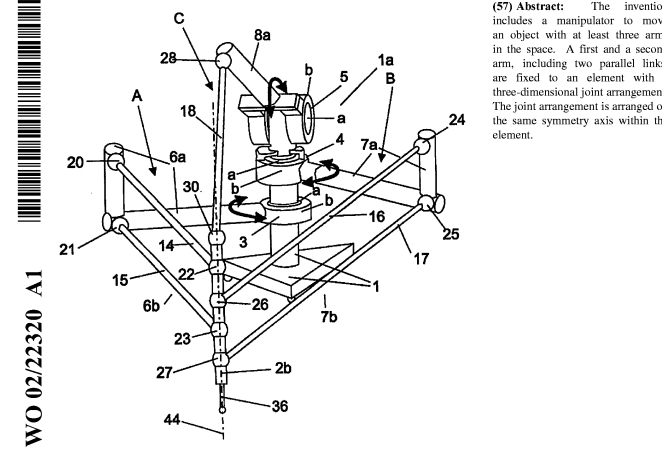
另外,Delta式的机器人也可以平放(如下图),做类似SCARA平面机器人的工作,相当灵活,下图是ABB公司的国际专利(PCT)申请,国际公布号WO 02/22320 A1. 公布日2002年3月21日。
但是遗憾的是它只能抓苍蝇不能打老虎,原因是它有多个二维柔性关节,身段太柔软了,如关节20,21,22,23,24,25,26,27,28,30都是二维球关节,多维数关节太多也影响了定位精度。
附带地补充一点:以上所及的不管是Delta 的创新还是SCARA 的创新,发明者一定既是机构的专家也必须通晓控制和算法,否则前面一片黑暗,悬崖无处不在,创新很难前行。例如怎样唯一的确定多杆驱动下的终端位置,如何反馈?双臂并联在逆向定位时,在某些特殊点上,给定终端位置可以有两个以上的电机输出解,任何控制?创新说起来容易,实践中有许多陈仓暗道,挫折紧相随。
综上所述,随着时间的推进,多种新式的SCARA会普及,从尔使工业领域受惠,难道不会吗?。
