唐建柳博士2022年2月28日
为什么斯马特莱平面机器人可以比现时的同类产品节能60%?现在让我们科学地说明这其中的道理。
现时市面上普遍使用的四轴5公斤工作载荷的平面机器人如下左图:
它的构造是将三个电机两个减速机安装在前臂上,这三个电机两个减速机重约12公斤,工作载荷才只有5公斤,但要戴着这12公斤额外的前臂负重以0.3秒的循环周期快速地运动,作了许多无用功,非常的耗能。
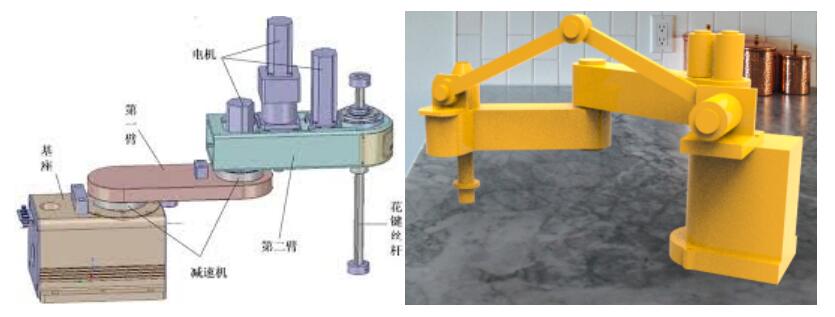
斯马特莱机器人的创新构造如右图,将前臂上的三个电机和减速机都移到了基座上,大大地减轻了额外的机器负载。
为什么机器人臂上的电机和减速机移到固定基座上可以节能呢?数理方法解析可以得到清晰的图景,分别用卡尔曼滤波法、牛顿迭代法、以及拉格朗日动力学广义动能方程: 求解即可得到该结果,网上可以检索到多篇学术界论文已得出优化结果,例如浙江大学张铁等人【平面关节型机器人关节力矩的卡尔曼估计】一文, 浙江大学学报(工学版),v.52; No.337(5);138-146,这里不再展开,直接给出结果:用拉格朗日广义动能方程求解,得出旧式的平面关节型机器人的驱动动能主要的有13项,而新式的只有3项,少了10项之多。所有的研究成果全都指向一个关键因数;即机器人臂上的承载(例如电机和减速机)越重和成载离基座的距离越大,所需的驱动动能就越大。相信许多喜欢体能锻炼的朋友都练过哑铃,为了增加手臂的肌肉力量,每天手握铁哑铃运动,哑铃越重手臂伸得越长越费力气,是不是?
求解即可得到该结果,网上可以检索到多篇学术界论文已得出优化结果,例如浙江大学张铁等人【平面关节型机器人关节力矩的卡尔曼估计】一文, 浙江大学学报(工学版),v.52; No.337(5);138-146,这里不再展开,直接给出结果:用拉格朗日广义动能方程求解,得出旧式的平面关节型机器人的驱动动能主要的有13项,而新式的只有3项,少了10项之多。所有的研究成果全都指向一个关键因数;即机器人臂上的承载(例如电机和减速机)越重和成载离基座的距离越大,所需的驱动动能就越大。相信许多喜欢体能锻炼的朋友都练过哑铃,为了增加手臂的肌肉力量,每天手握铁哑铃运动,哑铃越重手臂伸得越长越费力气,是不是?
现在去掉了臂上的电机和减速机,驱动动能可以减少2倍以上,5公斤级的平面机器人初级和二级电机分别是400瓦和400瓦共800瓦,按每班8小时两班16小时算,每台每天节能7.68千瓦时(度),这是很大的节能减碳比啊!因为平面机器人是工业制造领域里使用量最大的工业机器人,占工业机器人总量的50%。一千万台新型平面机器人就可以每天节能7.68亿度电,一年按200天工作日算就是1,536亿度电,按工业用电均价1.2元一度算就是一年近2千亿人民币,这对国民经济是不小的贡献!还可以缓解我国的能源压力。
